No products in the cart.
Return To Shop








Pixhawk 2.1 The Cube Blue



INSIDE THE CUBE
An STM32F427 Rev 3 Flight management unit. (where the flight controller lives.)
An STM32F100 I/O processor with pass through capabilities for failsafe. (deals with the Receiver and outputs )
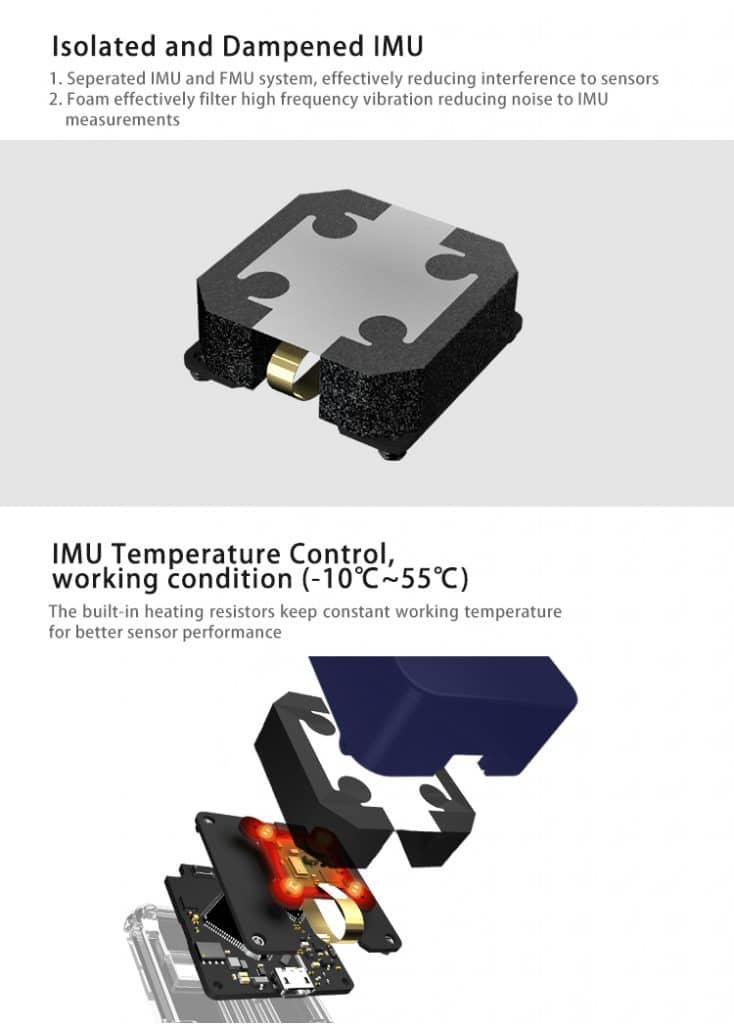
3 IMU’s
1 Fixed 10 Axis IMU on the main Main board.
(MPU9250 3 axis Accell, 3 axis gyro, and 3 axis mag, MS5611 Barometer)
2 Vibration Isolated and heat controlled 9DOF IMU’s and an isolated Baro.
(MPU9250 3 axis Accell, 3 axis gyro, and 3 axis mag, LSM303D 3 axis Accelerometer, 3Axis Magnatometer, L3GD20 3 Axis GyroMS5611 Barometer
In case you missed it…. 3 IMU’s STANDARD.
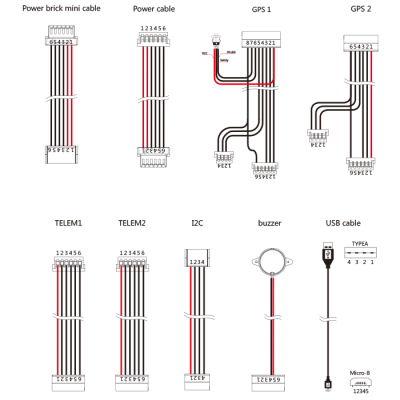
all connections are via an 80 pin DF17 connector on the base. the following connections are included.
2x CAN (pins reserved for a 3rd Can bus on next years model)
2x I2C
5x Serial (1 reserved for debug)
2x SWD debug ports
2x Power input V+I
1x Analogue input (one of the power inputs can be used as Analogue if you need)
Buzzer raw pwm
Safety switch
8 x I/O connected PWM out (Solder option for 3.3 or 5v levels, default 3.3)(opto drive capable 10mA each)
6 x Aux FMU connected I/O (PWM or alternate function)
Servo rail I/O backup power (10.5v Max)
2x 5.4v power in pins.
All other pins are reserved DNC.
Only logged in customers who have purchased this product may leave a review.
Related products


















Pixhawk 2.1 The Cube Blue
Reviews
There are no reviews yet.