No products in the cart.
Return To Shop
3DR Pixhawk Mini Flight Controller & Micro M8N GPS
This is MicroPX4 Combo set includes: Power mod, Micro M8N GPS.
Improvements over the original Pixhawk:
Smaller, a third of the size.
Rev 3 processor for long term software support.
Improved sensors, both primary and secondary IMU MPU9250 and ICM20608 for more reliable flight.
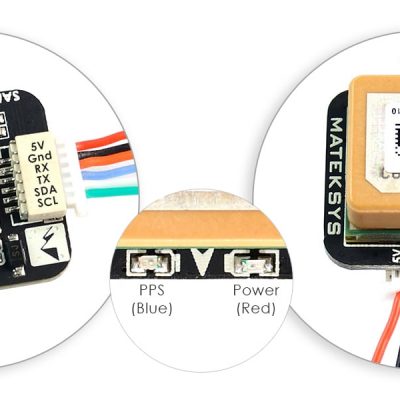
Included GPS module uBlox M8N GPS/GLONASS/BeiDou receiver for faster and stronger GPS lock.
Micro JST rather than the hard-to-use DF13 connectors.
Integrated piezo speaker and safety switch.
Natively supports 4S batteries with the included PDB.
Features
Advanced 32 bit ARM Cortex® M4 Processor running NuttX RTOS
8 PWM/servo outputs
Abundant connectivity options for additional peripherals (UART, I2C, CAN)
Redundant power supply inputs and automatic failover
Integrated safety switch and optional external safety button for easy motor activation
Multicolor LED indicator
Integrated multi-tone piezo audio indicator
microSD card for long-time high-rate logging
GPS module:
Based on the uBlox M8N
Concurrent reception of up to 3 GNSS (GPS, Galileo, GLONASS, BeiDou)
Industry leading –167 dBm navigation sensitivity
Security and integrity protection
Supports all satellite augmentation systems
Advanced jamming and spoofing detection
Product variants to meet performance and cost requirements
Includes:
Pixhawk Mini Autopilot
GPS module
Quad Power Distribution Board
8 Channel PWM Breakout board
4 pin i2c cable and breakout board
RC-in cable for PPM/SBUS
6 to 6/4 ‘Y’ adapter for GPS and additional I2C devices
6 pin cable (2)
6 pin JST to DF13 for legacy telemetry radio
External safety switch
8 channel PWM breakout cable
Mounting foam
When installing the 3DR telemetry radios, use the connectors that come with Pixhawk Mini, rather than those that come with the radios.
Weight and Dimensions:
Pixhawk Mini
38x43x12 mm
15.8 grams
GPS module
37x37x12 mm
22.4 grams
Only logged in customers who have purchased this product may leave a review.
Related products










3DR Pixhawk Mini Flight Contro...
Reviews
There are no reviews yet.